
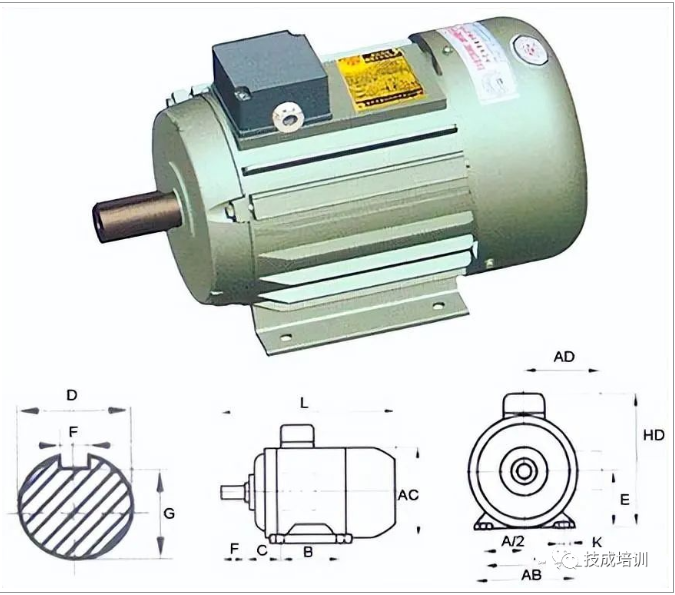
A sê-qonaxî asenkronmotorcureyekî motora înduksîyonê ye ku bi girêdana hevdem a herikîna AC ya sê-qonaxî ya 380V (cudahiya qonaxê 120 pile) dixebite. Ji ber ku zeviya manyetîk a rotor û stator a motorek asenkron a sê-qonaxî di heman alî û bi leza cûda dizivire, rêjeya şemitînê heye, ji ber vê yekê jê re motorek asenkron a sê-qonaxî tê gotin.
Leza rotorê motorek sê-qonaxî ya asenkron ji leza qada manyetîk a dizivire kêmtir e. Pêçandina rotorê ji ber tevgera nisbî ya bi qada manyetîk re hêza elektromotor û herikê çêdike, û bi qada manyetîk re têkilî datîne da ku torka elektromanyetîk çêbike, û veguherîna enerjiyê pêk tîne.
Li gorî asynchronous a yek-qonaxîmotor, sê-qonaxî asenkronmotorperformansa xebitandinê ya çêtir heye û dikare materyalên cûda hilîne.
Li gorî strukturên rotor ên cûda, motorên asenkron ên sê-qonaxî dikarin li gorî celebê qefes û celebê pêçayî werin dabeş kirin.
Motora asenkron a bi rotora qefesê xwedî avahiyek hêsan, xebitandinek pêbawer, giraniya sivik û bihayek kêm e, ku bi berfirehî hatiye bikar anîn. Dezawantaja wê ya sereke dijwariya rêkxistina leza ye.
Rotor û statora motorekî sê-qonaxî yê asenkron jî bi pêçên sê-qonaxî ve hatine sazkirin û bi rêya halqeyên şemitok û firçeyan bi reostatekî derveyî ve girêdayî ne. Guherandina berxwedana reostatê dikare performansa destpêkirina motorê baştir bike û leza motorê eyar bike.
Prensîba xebatê ya motora sê-qonaxî ya asynchronous
Dema ku herika alternatîf a sê-qonaxî ya sîmetrîk li ser pêça statora sê-qonaxî tê sepandin, zeviyek magnetîkî ya zivirî çêdibe ku li gorî saetê li qada dorhêl a hundurîn a stator û rotorê bi leza senkronîk n1 dizivire.
Ji ber ku zeviya magnetîkî ya zivirî bi leza n1 dizivire, rêberê rotorê di destpêkê de sabît e, ji ber vê yekê rêberê rotorê dê zeviya magnetîkî ya zivirî ya statorê bibire da ku hêza elektromotor a înduksîyonkirî çêbike (aliyê hêza elektromotor a înduksîyonkirî bi qaîdeya destê rastê tê destnîşankirin).
Ji ber kurteçûna rêberê rotorê li her du seriyên wê ji hêla zengileke kurteçûnê ve, di bin bandora hêza elektromotor a çêkirî de, rêberê rotorê dê herikeke çêkirî çêbike ku bi bingehîn di heman alî de ye wekî hêza elektromotor a çêkirî. Rêberê hilgirê herikê yê rotorê di qada manyetîk a statorê de rastî hêza manyetîk a elektromanyetîk tê (alîkariya hêzê bi karanîna qaîdeya çepê tê destnîşankirin). Hêza elektromanyetîk li ser şafta rotorê torka elektromanyetîk çêdike, û rotorê dixe ber bi aliyê qada manyetîk a zivirî ve bizivirîne.
Bi rêya analîza jorîn, meriv dikare bigihîje wê encamê ku prensîba xebatê ya motorek elektrîkê wiha ye: dema ku pêçên statorê yên sê-qonaxî yên motorê (her yek bi ferqa goşeya elektrîkê ya 120 pile) bi herika alternatîf a sê-qonaxî ya sîmetrîk têne xwarin, zeviyek magnetîkî ya zivirî çêdibe, ku pêça rotorê qut dike û herika înduktîf di pêça rotorê de çêdike (pêça rotorê çerxek girtî ye). Rêbera rotorê ya hilgirê herikê dê di bin bandora zeviya magnetîkî ya zivirî ya statorê de hêza elektromagnetîk çêbike. Bi vî rengî, torka elektromagnetîk li ser şaftê motorê çêdibe, ku motorê dixe ber bi heman alî ve wekî zeviya magnetîkî ya zivirî.
Diyagrama têlkirinê ya motora sê-qonaxî ya asinkron
Kabloyên bingehîn ên motorên asinkron ên sê-qonaxî:
Şeş têlên ji pêçandina motorek sê-qonaxî ya asenkron dikarin li du rêbazên girêdana bingehîn werin dabeş kirin: girêdana delta-delta û girêdana stêrk.
Şeş têl=sê pêçên motorê=sê seriyên serî+sê seriyên dûvikê, bi multimeterekê girêdana di navbera seriyên serî û dûvikê yên heman pêçandinê de dipîve, ango U1-U2, V1-V2, W1-W2.
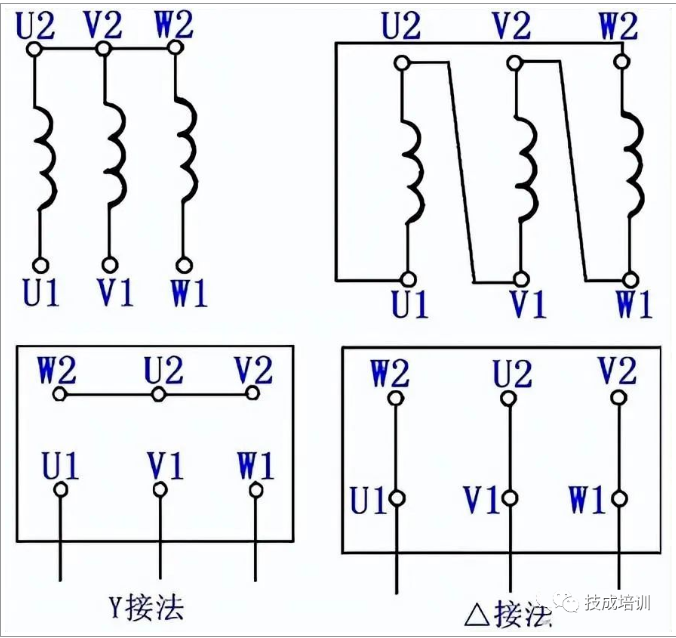
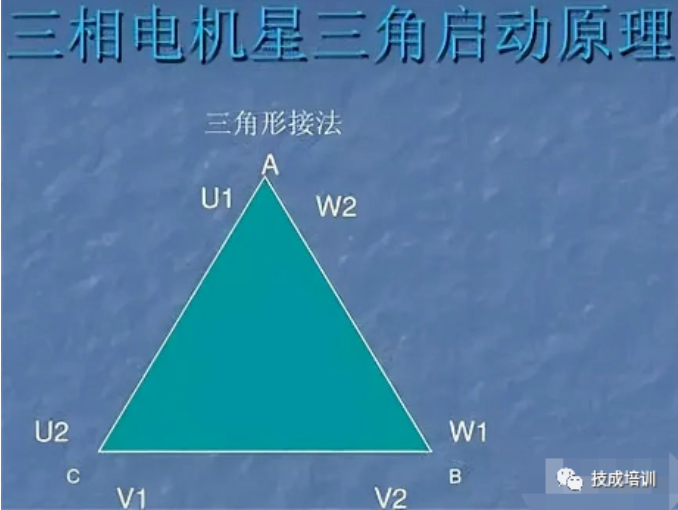
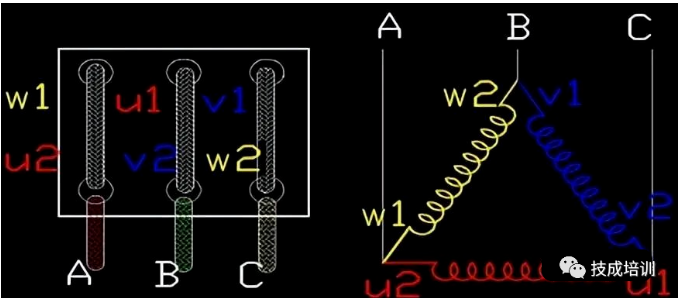
1. Rêbaza girêdana sêgoşeya delta ji bo motorên asynchronous ên sê-qonaxî
Rêbaza girêdana deltaya sêgoşeyî ew e ku ser û dûvikên sê pêçan bi rêzê ve girêdide da ku sêgoşeyek çêbibe, wekî ku di wêneyê de tê xuyang kirin:
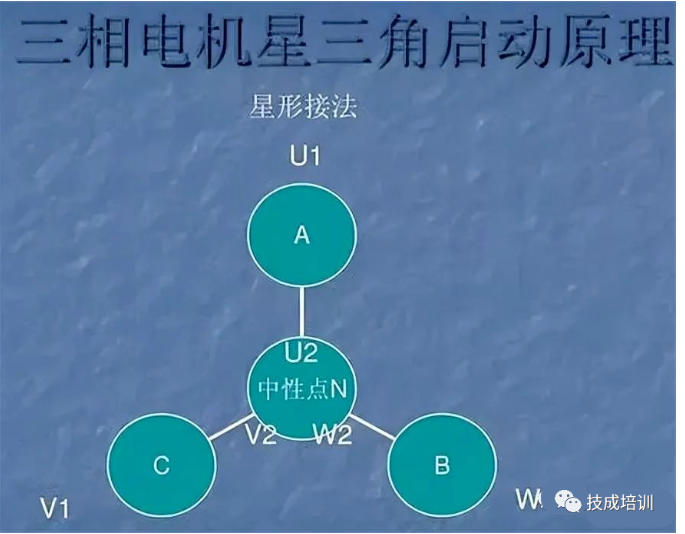
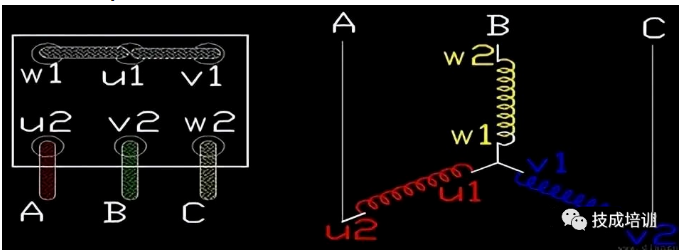
2. Rêbaza girêdana stêrk ji bo motorên asynchronous ên sê-qonaxî
Rêbaza girêdana stêrk ew e ku serê sê pêçan bi hev ve girêbide, û sê têlên din wekî girêdanên hêzê têne bikar anîn. Rêbaza girêdanê wekî ku di wêneyê de tê xuyang kirin:
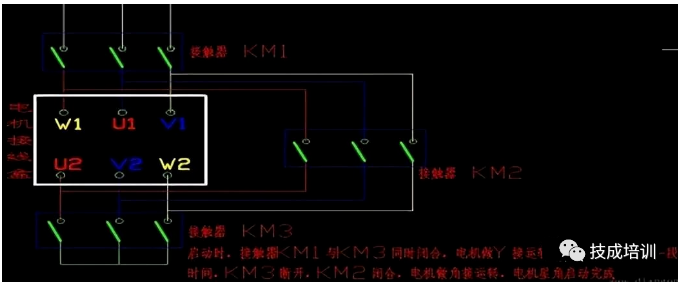
Şirovekirina Diyagrama Têlkirinê ya Motora Asenkron a Sê Qonaxî bi Wêne û Nivîsê
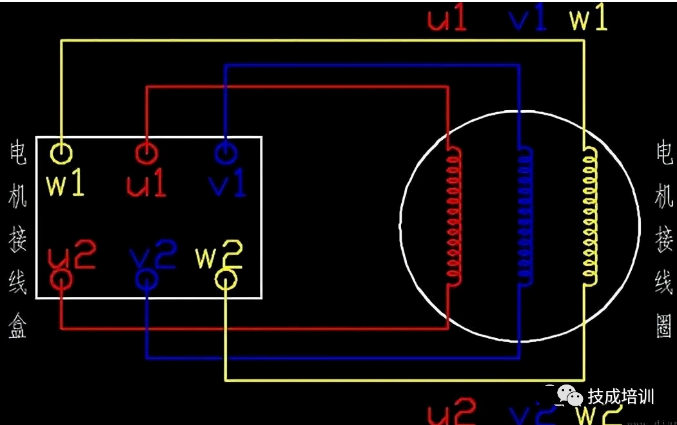
Qutiya girêdana motora sê qonaxan
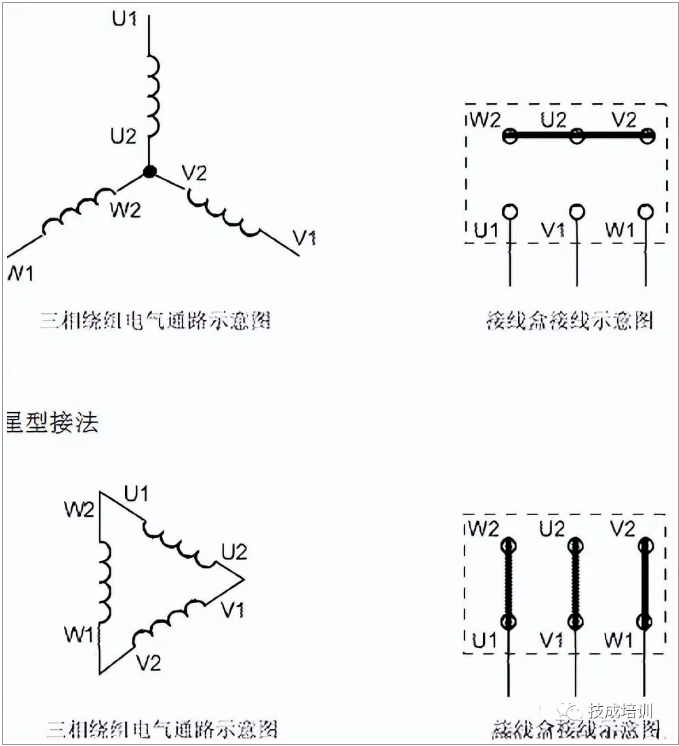
Dema ku motora asenkron a sê-qonaxî tê girêdan, rêbaza girêdana perçeya girêdanê di qutiya girêdanê de wiha ye:
Dema ku motora asenkron a sê-qonaxî bi quncikê ve girêdayî be, rêbaza girêdana perçeya girêdana qutiya girêdanê wiha ye:
Ji bo motorên sê-qonaxî yên asinkron du rêbazên girêdanê hene: girêdana stêrk û girêdana sêgoşeyî.
Rêbaza sêgoşeyîkirinê
Di pêçên pêçandinê yên bi heman voltaja û qûtra têlê de, rêbaza girêdana stêrk sê caran kêmtir zivirandin di her qonaxê de (1.732 caran) û sê caran kêmtir hêz ji rêbaza girêdana sêgoşeyî heye. Rêbaza girêdana motora qedandî ji bo ku li hember voltaja 380V bisekine hatiye sabît kirin û bi gelemperî ji bo guherandinê ne guncaw e.
Rêbaza girêdanê tenê dikare were guhertin dema ku asta voltaja sê-qonaxî ji 380V ya normal cuda be. Bo nimûne, dema ku asta voltaja sê-qonaxî 220V be, guhertina rêbaza girêdana stêrkî ya voltaja sê-qonaxî ya orîjînal 380V bo rêbaza girêdana sêgoşeyî dikare were sepandin; Dema ku asta voltaja sê-qonaxî 660V be, rêbaza girêdana delta ya voltaja sê-qonaxî ya orîjînal 380V dikare were guhertin bo rêbaza girêdana stêrkî, û hêza wê bêguher dimîne. Bi gelemperî, motorên hêza kêm bi stêrkî ve girêdayî ne, lê motorên hêza bilind bi delta ve girêdayî ne.
Di voltaja nominal de, divê motorek bi girêdana delta were bikar anîn. Ger ew bi motorek bi girêdana stêrk were guhertin, ew aîdî xebitandina voltaja kêmkirî ye, di encamê de hêza motorê û herika destpêkirinê kêm dibe. Dema ku motorek bi hêzek bilind (rêbaza girêdana delta) tê destpêkirin, herik pir zêde ye. Ji bo kêmkirina bandora herika destpêkirinê li ser xetê, bi gelemperî destpêkirina gav-bi-jêr tê pejirandin. Yek rêbaz ev e ku rêbaza girêdana delta ya orîjînal ji bo destpêkirinê biguhezîne rêbaza girêdana stêrk. Piştî ku rêbaza girêdana stêrk tê destpêkirin, ew ji bo xebitandinê vediguhere rêbaza girêdana delta.
Diyagrama têlkirinê ya motora sê-qonaxî ya asinkron
Nexşeya fîzîkî ya xetên veguhestina pêş û paşve ji bo motorên sê-qonaxî yên asenkron:
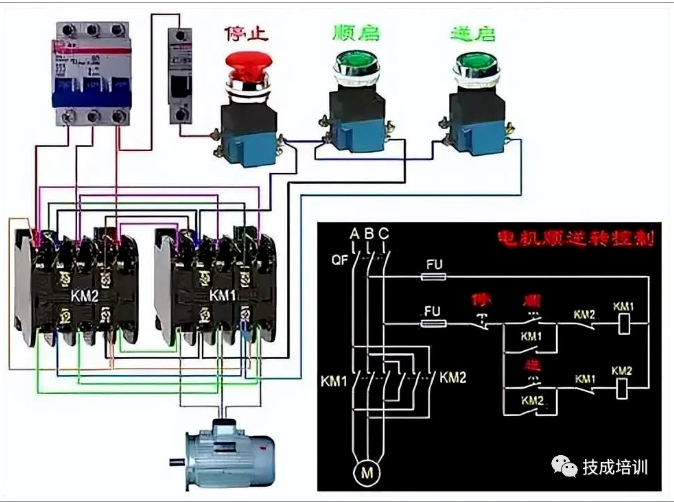
Ji bo kontrolkirina pêş û paşve ya motorekê, her du qonaxên dabînkirina hêzê dikarin li gorî hev werin verastkirin (em jê re dibêjin komutasyon). Bi gelemperî, qonaxa V bêguher dimîne, û qonaxa U û qonaxa W li gorî hev têne verastkirin. Ji bo ku piştrast bibe ku rêza qonaxê ya motorê dikare bi pêbawerî were guheztin dema ku du kontaktor dixebitin, têlkirin divê li porta jorîn a têkiliyê lihevhatî be, û divê faz li porta jêrîn a kontaktorê were verastkirin. Ji ber guheztina rêza qonaxê ya her du qonaxan, pêdivî ye ku were piştrast kirin ku her du bobînên KM nekarin di heman demê de werin xebitandin, wekî din xeletiyên kurtçerxeya qonax bi qonax dikarin çêbibin. Ji ber vê yekê, divê kilîtkirin were pejirandin.
Ji ber sedemên ewlehiyê, pir caran devreyek kontrola pêş û paşve ya ducarî ya bi hev ve kilîtkirî bi hev ve kilîtkirina bişkokan (mekanîkî) û kilîtkirina têkiliyê (elektrîkî) tê bikar anîn; Bi karanîna hev ve kilîtkirina bişkokan, her çend bişkokên pêş û paşve di heman demê de werin pêlkirin jî, her du têkilîkarên ku ji bo verastkirina qonaxê têne bikar anîn nikarin di heman demê de werin xebitandin, û bi vî rengî kurtçûnên qonax bi qonax ji hêla mekanîkî ve têne dûr xistin.
Herwiha, ji ber girêdana navbera kontaktorên sepandî, heta ku yek ji kontaktoran vekirî be, têkiliya wê ya dirêj girtî nagire. Bi vî awayî, di sepandina girêdana dualî ya mekanîkî û elektrîkê de, pergala dabînkirina hêzê ya motorê nikare kurteçûnên qonax bi qonax hebin, bi bandor motorê diparêze û ji qezayên ku ji ber kurteçûnên qonax bi qonax di dema modulasyona qonaxê de çêdibin, ku dikarin kontaktorê bişewitînin, dûr dikeve.
Dema şandinê: Tebax-07-2023


